産業用ロボットとは?
グーグルで「産業用ロボット」と検索画像を表示させると、以下のようなページ一覧が表れる。主に製造分野で導入される腕の形状をした加工用途ロボットだ。私自身も普段の仕事で「ロボット」という言葉を使う時は、これらを意味して使う時が多い。

改めて、産業用ロボットとは何か整理するために日本工業規格(JIS)で定義を確認する。
ロボット及びロボティックデバイス−用語
JIS B 0134:2015 (ISO 8373:2012)
2.9 産業用ロボット Industrial robot
自動制御され,再プログラム可能で,多目的なマニピュレータであり,3軸以上でプログラム可能で,1か所に固定して又は移動機能をもって,産業自動化の用途に用いられるロボット。
注記1 産業用ロボットは,次のものを含む。
−マニピュレータ(アクチュエータを含む)
−制御装置[ペンダント及び通信インタフェース(ハードウェア及びソフトウェア)を含む]
注記2 産業用ロボットは,統合による追加軸を含む。
JISB0134:2015 ロボット及びロボティックデバイス-用語
「3軸以上」且つ「プログラム可能」であることが産業用ロボットの要件であることがわかった。
以下に、今日からモノ知りシリーズの『ロボットの本』から一部引用する。
")
現在、ロボットの中で大きな市場を確立しているのが産業用ロボットである。
アーム型ロボットに代表される、人間の腕や手に類似した機構を持つだけのシンプルなマシン(マニピュレータ)だが、「教えた動作をプログラムとして記憶して再生する」というティーチングプレイバック機能によって多彩な働き方ができる。
そのため溶接や塗装、加工・組立、搬送といった生産工程の幅広い分野で活躍している。
特定の作業しかできない専用機と違い、産業用ロボットの場合はプログラミングによって作業内容を変えられる、つまり多様性があることが最大の特徴である。
産業用ロボットの種類
産業用ロボットは機構の仕組みによって、大きく以下のように分類される。
垂直多関節ロボット

(画像:川崎重工業株式会社)
産業用ロボットはどんな構造?ロボットアームが動く仕組みを徹底解説 | XYZ | 川崎重工業株式会社
垂直多関節ロボットは人間の腕に近い構造で軸数は4軸、5軸、6軸のものが一般的である。
原理上は6軸あれば、手先の位置と姿勢を一通りカバーできるようになるが、軸数が多いほど様々な姿勢を取ることが可能で汎用性が高くなる。
垂直多関節ロボットは人間の腕の構造に似ているため、人間の代替作業をさせる装置として最も合理的な形と言える。また、稼働範囲に比べて設置面積が少ないためレイアウトしやすく、水平多関節ロボットと比較し上下方向の動作範囲全てに手先が届く事が特徴である。
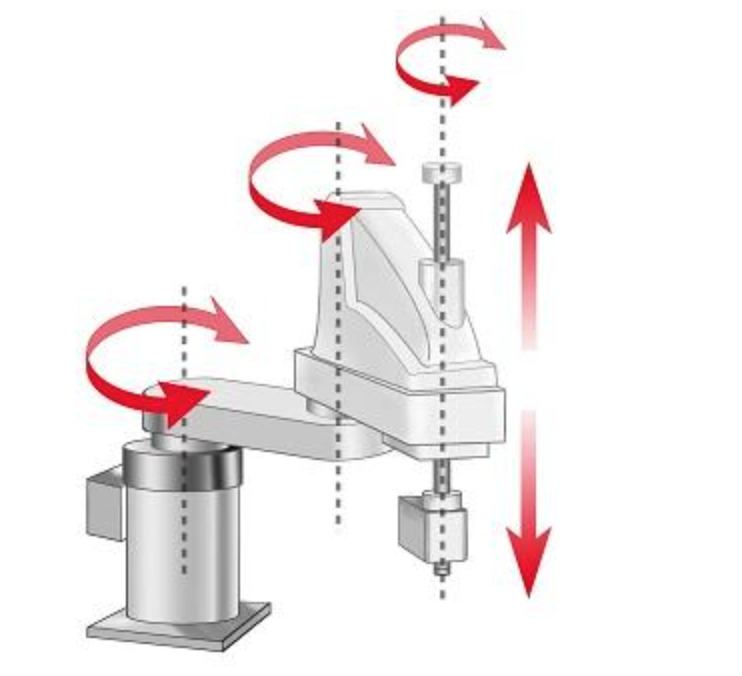
水平多関節ロボット(スカラロボット)
(画像:安長電機株式会社)
水平多関節ロボット(スカラロボット)が活きる現場 | 安長電機株式会社
水平多関節ロボットとは、一般的には4軸構成で、平面3自由度の位置決めとアーム先端の上下運動による押し込み動作が可能である。水平方向にコンプライアンス(柔らかさ)を持ちながら最後のスライド軸は傾きにくいようになっているため、部品を押し込む動作を実現しやすい。
スカラ(SCARA)とはSelective Compliance Assembly Robot Armの略であり、スカラロボットと呼称される。
垂直多関節ロボットに比べてコスト面で優位であり、組立工程の装置には広く普及している。3軸タイプもラインナップとしてはあるが、あまり使われず、4軸に比べてアーム先端の回転機能がないものとなる。
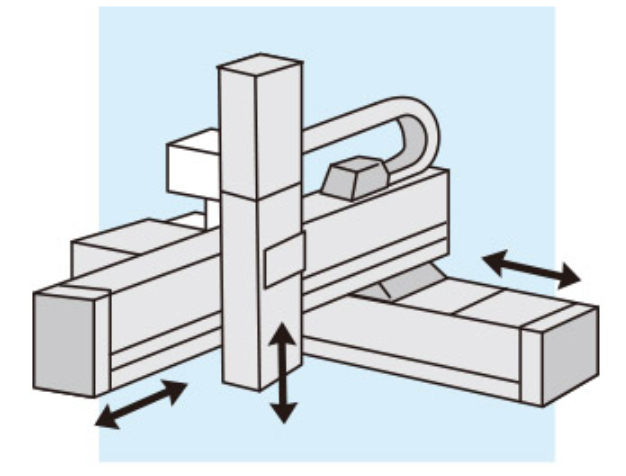
直角座標ロボット
(画像:株式会社安川電機)
直角座標ロボットは、直線的な動きだけをするロボットで、直交型ロボット、ガントリーロボットと呼ばれることもある。縦・横・高さという3方向をスライドのみで直交(往復)して、組立、搬送、検査といった作業が可能。
安価、位置決めが高精度、剛性が高いといった特徴を持つ。
座標型による分類では、他にリンクで旋回しながら上下移動する円筒座標型、旋回軸を中心にアームの上下回転と伸縮を組み合わせた極座標型などがある。
ちなみに、JISでは直角座標ロボットは以下のように定義されている。
腕に三つの直進ジョイントを持ち、それらの軸が直角座標系に一致するロボット。
ーJIS B 0134:2015 (ISO 8373:2012)
パラレルリンクロボット

(画像:ハイウィン株式会社)
【RDシリーズ】パラレルリンクロボット(デルタロボット) | ハイウィン - Powered by イプロス
先端部を複数の軸によって並列(パラレル)に動作させるロボット。
構成要素としては、
・天井や装置上部に固定されて吊り下げられるベース部
・ベースから伸びる3対の骨組みであるリンク部
・リンクをつなぐジョイント部
に大きく分けられる。
JISでは、以下のように定義されているが、少し分かりづらい。
腕に閉ループ構造を構成するリンクをもつロボット。
ーJIS B 0134:2015 (ISO 8373:2012)