")
ロボットは構造的にも機能的にも複雑な機械だが、構成している要素技術は以下の3つに大別される。
1.知能・制御系
2.駆動・構造系
3.センサ系
知能・制御系とは
知能・制御系は頭脳と神経網にあたり、センサからの情報を処理して全身のコントロールを行うコンピュータシステムのことで、パソコンとマイコン(マイクロコントローラ)がある。
パソコンは必要となるアプリケーションによって機能を追加できる汎用性の高さが魅力だが、スペース占有が大きいためにコントローラが大型化になってしまう。一方、コンピュータシステムを一つのLSIに納めたマイコンは単価が安く、設置スペースや消費電力も小さいため装置の小型化やコストダウンに貢献できる。
このため、研究用途や開発途中のロボットはパソコンで制御し、量産化時に必要な機能を取捨選択しマイコンに切り替えるのが一般的な開発手順となる。
また、ロボットの基本OSについては基盤技術の部分は共通ソフトウェアとしてオープン化させる流れが活発になっている。従来のロボットは開発する企業や研究機関ごとに独自の方式を採用しており、OSやプログラミング言語に共通点は少ないために互換性がなかった。
オープンソース化された基盤技術を上手く活用することで開発コストや期間の短縮が期待できる。
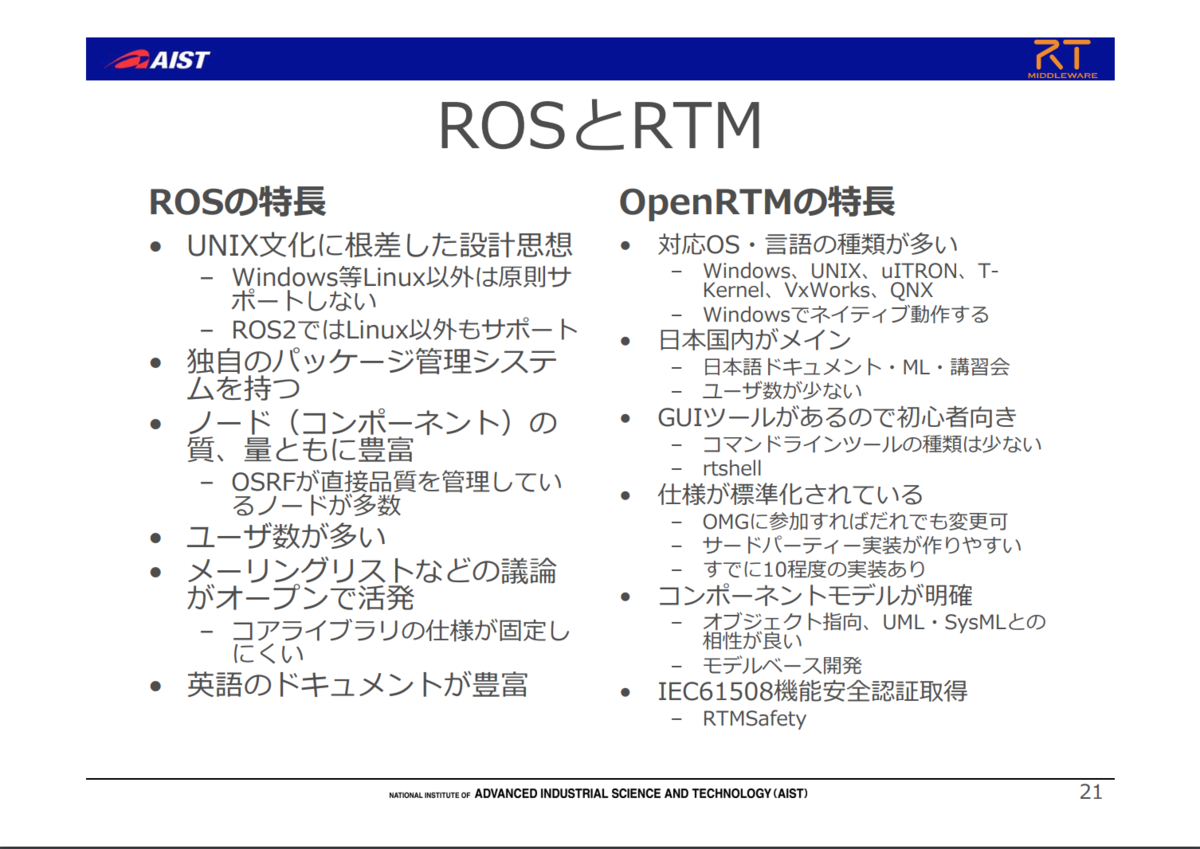
代表的なロボット用ソフトウェアとしては、米国ベンチャーのWillow Garage社が開発した『ROS』(Robot Operating System)というLinux系のオープンソースがある。2007年に公開され、2017年には『ROS 2』へとバージョンアップされた。世界でもユーザ数が多いために実質的にデファクト標準的な地位にある。
日本では産総研が開発を主導している『OpenRTM-aist』がある。こちらは2002年にNEDOで国プロとして開発が始まったもので対応するOSや言語の種類でメリットはあるものの、世界の中ではいまいち存在感を示せていないようだ。
産総研ロボットイノベーション研究センターのプレゼン資料を見つけたので以下に抜粋する。
https://openrtm.github.io/190605-01.pdf
このスライドの中で、米国発ROSと日本発RTMの比較があるが、RTMに関しては日本国内がメイン、且つ、利用ユーザが少ないというのはオープンソース化しようとする技術において致命的な欠点だと個人的に思う。モノの本質的に多少優れていてもフォーラムが盛り上がっていなかったり、ネットに情報の量と質が少ないものはやはり扱う上で苦労がつきまとう。
駆動・構造系とは
駆動・構造系は筋肉や骨格にあたり、モータなどのアクチュエータや動力伝達機構、アーム、ハンドツール、移動機構、筐体などで対象範囲は広い。
筐体に使われる材料の選択基準は、産業用ロボットとサービスロボットで異なる。産業用ロボットの場合、精度の高さが求められることから主要部分は鋼板などで作るのが一般的であったが、最近は軽量化を目的としてアルミや樹脂系材料の適用も検討され始めている。
アクチュエータは動き方によって回転型と直動型に分けられ、それぞれ動力源ごとに電動式、空圧式、油圧式がある。
ロボットでもっともよく使われるのは回転型電動式アクチュエータに分類されるサーボモータとステッピングモータで、回転角度や速度を制御しやすいことから軸や移動機構などさまざま場所で用いられる。
動力伝達機構としては減速機がある。モータは回転数を上げやすい一方、大きなトルクは得にくいので、減速機を用いて回転数を落としトルクに変換する。減速機はロボットの構成要素のなかでも重要な機構で、平歯車減速機、遊星歯車減速機、ウォーム減速機、ハーモニックドライブ等の種類がある。
移動機構については、まず産業用ロボットの大半は土台に固定されて動かないか、レールに沿って動くだけであり自由な移動機能は持たない。サービスロボットでは用途に応じて移動機構を付与するが、人間のような二足歩行はバランスを取る難しさや効率の悪さからロボットとしてはあまり採用されず、整地された場所の移動を目的とするなら車輪型、非聖地であればキャタピラ型や多足歩行(四足、六足)が採用される。
センサ系とは
センサ系は人間に例えると感覚器官であり、目や耳などのように外界からの情報を得るものと、(機械)内部の状態を知る内界センサに大別される。以下に示すような様々な種類のセンサが開発、実用化されているが、人間とロボットの最大の違いは、
・ロボットでは活用目的に応じて必要な機能を取捨選択できること
・生物では持たない検知機能を付与することができること
・配置や数に制限がないこと
である。配置や数に制限がないというのは、たとえば「目」の位置について動物では視神経をできるだけ短くするために脳に近い所にある場合が多いが、ロボットではそのような制限はなく、組立を行うアーム型の産業用ロボットでは手の部分にカメラ(視覚機能)を持たせることもある。ロボットの場合は数も必要に応じて設計できるので、視覚を司るカメラは2つまでという制限もない。
外界センサ
人間の感覚として一般的に知られるものに五感がある。つまり視覚(目)、聴覚(耳)、触覚(皮膚)、味覚(舌)、嗅覚(鼻)の5つによって外界を感知しており、ロボットの外界センサも当初は生物が持つ感覚器官と同様の機能を目指して開発されてきた。たとえば、視覚用の画像センサ、聴覚用の音センサ、触覚用の感圧センサ等がよよく知られる。
ロボットに付与できる外界センサと感知対象は幅広く、以下のようなものがある。
【視覚】 画像センサ(CCD、CMOS)、光電センサ、赤外線センサ、X線センサ、コード読取
【聴覚】 音センサ、声紋認証センサ
【触覚】 感圧センサ、感熱センサ、湿度センサ
【味覚】 味覚センサ
【嗅覚】 においセンサ、イオン濃度センサ、ガス濃度センサ
【平衡感覚】 加速度センサ、ジャイロセンサ
【距離感覚】 超音波センサ、近接センサ、変位センサ
【磁気感覚】 地磁気センサ、金属探知センサ
【時間感覚】 時計、タイマー
【位置感覚】 加速度センサ、GPS
【電波受信】 アンテナ
【放射線計測】 放射線センサ
内界センサ
人間の感覚には外界に向けられたもの以外にも内臓感覚と呼ばれる内界の感知がある。人間の場合は、空腹感や疲労感、痛覚といった感覚である。
ロボットにも内界センサは必要とされ、そのなかで最も重要なのがモータの回転角度や速度を検出するために用いられる「エンコーダ」である。
【動作制御】 ロータリーエンコーダ、ポテンショメータ、ひずみゲージ、力覚センサ
【姿勢制御】 加速度センサ、ジャイロセンサ
【電力制御】 ブースタ、インバータ
【温度制御】 温度センサ